El transporte es el responsable todavía del 25% de las emisiones de gases de efecto invernadero en Europa y contribuye de forma notable a la contaminación del aire, los niveles de ruido y la fragmentación de hábitats naturales para flora y fauna. A pesar de que el desarrollo tecnológico y el estancamiento debido a la crisis económica han contribuido a reducir el impacto contaminante del transporte en general y de la automoción en particular, todavía queda mucho por hacer para cumplir el nuevo reto que se plantea la Unión Europea en este terreno: reducir un 60% las emisiones de gases de efecto invernadero para el año 2050.
La contaminación se ha reducido de manera sustancial en las últimas dos décadas, pero, sin embargo, el 90% de los habitantes urbanos están todavía expuestos a niveles de contaminación en el aire que la Organización Mundial de la Salud considera peligrosos.
Como nota positiva se debe indicar que el transporte se ha acercado bastante al objetivo de alcanzar una cuota del 20% de renovables en las formas de energía utilizadas para el movimiento de los vehículos en cada país miembro. La cuota promedio de energías renovables en la UE-28 creció del 3,4% al 5,1% entre 2011 y 2012. La principal causa de esta evolución no es, sin embargo, el uso de electricidad renovable, de penetración muy marginal, sino el empleo de biocombustibles. El volumen de coches puramente eléctricos en el parque de automóviles es de sólo el 0,04% y representa un exiguo 0,22% del total de nuevas matriculaciones en Europa.
En automóviles convencionales la eficiencia también ha mejorado de manera considerable. Un vehículo promedio emitía 127g de CO2 por kilómetro en 2013, ya por debajo del objetivo europeo de 130g/km establecido para el año 2015. Sin embargo, a los fabricantes todavía les espera un importante esfuerzo ante el nuevo límite impuesto por Europa: 95g/km en 2020.
El transporte genera asimismo un importante nivel de contaminación acústica. El tráfico por carretera, en concreto, expone a más gente a niveles de ruido perjudiciales que ningún otro sector.
Por último, la infraestructura viaria tiene un importante impacto en la división de hábitats naturales para un gran número de especies vegetales y animales.
En la siguiente figura se observa el crecimiento relativo de los distintos tipos de transporte en Europa, respecto a los niveles del año 2000. Se aprecia un crecimiento razonablemente parejo al del producto interior bruto. La influencia de la crisis ha contribuido a ralentizar el crecimiento en todos los subsectores del sector transporte.

Figura 1 – Crecimiento de los distintos tipos de transporte en Europa respecto a niveles del año 2000. Comparación con la evolución del producto interior bruto (GDP). Fuente: UE.
Desde el año 1990, el peso relativo del transporte en el consumo de energía por sectores en Europa ha oscilado entre el 25 y el 35%. Por último, subrayar que el transporte por carretera, en particular, supone el 72% del volumen total de emisiones del sector transporte en la UE-27.
En este contexto, la solución para minimizar el impacto negativo del sector del transporte en general y de la automoción en particular es invertir en mejoras tecnológicas tanto en la tracción y motorización de los vehículos como en su forma de uso. Este artículo tiene el objetivo de presentar las últimas tendencias en estas dos líneas de actuación, con especial énfasis en los modelos de uso del automóvil en el futuro, principalmente la conducción automática, ya que es un tema menos conocido y más novedoso.
El futuro de la automoción
a.- Nuevas tecnologías de mayor sostenibilidad en el automóvil: vehículos eléctricos, híbridos y otras tecnologías (hibridación hidráulica, pilas de combustible, etc.).
En el camino a la automoción del futuro son los vehículos híbridos y eléctricos una de las tecnologías que está acaparando más difusión en los medios. Sin embargo hay una serie de tecnologías alternativas que también compiten por convertirse en la principal tecnología del futuro o, al menos, por participar de manera importante en el mix de opciones que es previsible que exista en las próximas décadas.
Centrándonos en las tecnologías de tracción y motorización que están en fase de investigación, desarrollo o ya en fase comercial, una de las que mayor atención pública ha recibido es, como se indicaba, la tracción híbrida o eléctrica.
El uso de coches puramente eléctricos (Battery Electric Vehicles o BEV) es uno de los posibles caminos hacia un sector de transporte con cero emisiones. Los principales retos a los que se enfrenta esta tecnología son bien conocidos por el público general: baja autonomía del vehículo y elevado precio. El elemento responsable de estas dos principales limitaciones es la batería. Su baja densidad de potencia (no es un sistema de acumulación eficiente para picos de carga o descarga de energía – aceleraciones o frenazos bruscos) hace necesario un mayor desarrollo de las familias de baterías actuales más avanzadas, la investigación en nuevas químicas y la combinación de la batería con otros elementos como supercondensadores o volantes de inercia, de los que ya existen interesantes desarrollos para automoción, llevados a cabo por grandes actores del sector. Algunos de estos desarrollos han sido fruto de la transferencia de sectores de vanguardia como la Fórmula 1, que ha permitido, por ejemplo gracias al KERS, o sistema de recuperación de energía cinética en las frenadas, una interesante evolución de dispositivos de almacenamiento de energía eléctrica.
La otra gran pata tecnológica de los vehículos eléctricos es el motor eléctrico en sí. En este campo, y una vez más con el objetivo de aportar datos que puedan resultar menos conocidos para el público general porque suelen tener menos publicidad, se van a comentar a continuación de forma breve las diferentes alternativas tecnológicas que se están desarrollando o que ya funcionan comercialmente en el área de motores eléctricos.
El enfoque más interesante, en nuestra opinión, es explicar el porqué de las diferentes líneas de investigación actuales en el campo de la motorización eléctrica. La mayoría de los motores eléctricos actuales que podemos encontrar en vehículos híbridos o puramente eléctricos están constituidos por imanes de un material basado en tierras raras (Neodimio-Hierro-Boro, NdFeB). Estos imanes permiten el diseño de motores con elevada densidad de par, lo que los hace compactos y ligeros, a la vez que de una elevada eficiencia.
Sin embargo hay varios argumentos que justifican que, quizá, no sea ésta la mejor tecnología a largo plazo. Los imanes de tierras raras son caros, haciendo que se duplique el coste de materias primas del motor eléctrico, no siendo especialmente sostenibles en aspectos como su extracción en minas y su procesamiento.
Los motores de NdFeB pueden además no resultar tan eficientes durante la operación normal de un vehículo como a veces se nos hace creer, puesto que, entre otros factores, necesitan estrategias de control para debilitar la influencia de los imanes y poder funcionar a altas velocidades, lo que reduce su eficiencia real.
Empresas como Renault o Tesla emplean ya otras tecnologías alternativas como rotor bobinado y motores de inducción, respectivamente, que no emplean tierras raras. Éstas y otras tecnologías, principalmente los motores de reluctancia conmutada y los que reemplazan los imanes de tierras raras con alternativas más económicas como las ferritas, pueden ser los candidatos para producir motores eléctricos todavía con mejores prestaciones que los basados en imanes de tierras raras.
En las siguientes figuras se muestran ejemplos de los motores más relevantes.

Figura 2 – De izquierda a derecha: motor de imanes permanentes interiores de 80kW del Nissan Leaf; motor de ferrita de 60kW; motor de reluctancia conmutada de 75kW utilizado en camiones híbridos; rotores de motores de inducción con jaula de ardilla en cobre; motor síncrono de rotor bobinado. Fuente: Newcastle University, Reino Unido (2015).
Antes de concluir con este breve epígrafe sobre tipos de tracción y motorización de vehículos se ofrece a continuación una pincelada sobre las últimas tendencias de cara al futuro. ¿Qué mejor manera de hacerlo que asomarse al reciente Salón Internacional de Frankfurt 2015, el evento bienal más importante del mundo en el sector de automoción?
Una de las tendencias clave que se han podido ver en este evento es la clara apuesta de muchas marcas por nuevos segmentos del mercado de los híbridos y eléctricos, como por ejemplo el de los vehículos premium y de lujo.
Durante los dos últimos años, Tesla Motors, fabricante americano que comenzó con deportivos eléctricos de gran potencia y que ha sido uno de los principales dinamizadores del sector de los vehículos eléctricos y la tecnología asociada (especialmente en baterías), ha estado reduciendo el precio de sus coches para intentar robar clientes a las marcas tradicionales. Sus modelos son la referencia en el segmento premium.
Otras marcas, como Aston Martin, actor tradicional del segmento de vehículos de lujo, también están apostando por ofrecer vehículos eléctricos a un precio más competitivo, para su segmento claro está. El Modelo S de Tesla y el sedan de lujo eléctrico Rapide de Aston Martin se perfilan como dos modelos en clara competencia en los segmentos de precio más alto de los vehículos eléctricos, lo que demuestra que no sólo hay gran actividad en segmentos de coste más económico.
El Rapide de Aston Martin se espera que llegue al público en 2017, con una brutal potencia de 800CV y una autonomía de 350km, según la marca. El precio de uno de estos eléctricos de lujo rondaría los 200.000 a 250.000 dólares, frente a los 140.000 dólares de la versión más cara del Modelo S de Tesla.
En los próximos años también habrá competencia al máximo nivel en el segmento de crossovers, ya que Aston Martin presentará un DBX 100% eléctrico hacia 2020 y Audi comercializará un modelo propio, el futuro Audi e-tron quattro. Todo esto para competir con el Modelo X de Tesla, que se lanzará al mercado próximamente.
Como muestra de las tecnologías que usarán estos vehículos de nueva generación, el modelo de Audi tendrá tres motores eléctricos, con una arquitectura parecida a la del R8 eléctrico: uno en el eje delantero y dos en el trasero. Aunque no hay datos oficiales, según diversos informes, este modelo podría tener unos 500 CV de potencia.
Finalmente, y para demostrar la batalla de precios que se empieza a dar en otros segmentos de eléctricos, Tesla ha intentado competir también en rangos de precios más baratos con su Modelo 3, que se espera, como muy pronto, hacia 2017. No va a poder competir, sin embargo, con modelos como el Chevrolet Bolt, con una autonomía de 350 km, que cuesta como máximo 30.000 dólares.

Figura 3 – De izquierda a derecha: Aston Martin Rapide – el Rapide en su modelo térmico lleva motor Aston V-12 de 470 CV, pero en su versión eléctrica alcanzaría una potencia de 800 CV; Audi e-tron quattro; Tesla Modelo S y Tesla Modelo X.
En términos de volumen de negocio en general en el mercado de los 100% eléctricos, después de unos años convulsos, y según declaraciones de Carlos Ghosn, CEO de la alianza Renault-Nissan, en el futuro más próximo este tipo de vehículos empezará por fin a generalizarse. Renaul-Nissan es el fabricante del eléctrico más vendido del mundo, el Nissan Leaf.
Sin embargo, no todos los actores de este sector opinan lo mismo. La reciente tendencia bajista de los precios de los combustibles derivados del petróleo ha provocado una fuerte caída en las ventas de los eléctricos. De hecho, el propio Leaf ha visto cómo sus cifras de venta se desplomaban en varios períodos de los últimos años (incluso un 23% durante el primer semestre de 2013 en EEUU, por ejemplo).
Según Ghosn, esta situación es transitoria y el futuro es mucho más prometedor, sobre todo con el lanzamiento de una serie de nuevos modelos de rango extendido.
A pesar de esto, una buena muestra de la juventud del sector de los vehículos eléctricos y de la apuesta por diversas tecnologías alternativas es el reciente movimiento de la propia Nissan, que no ha apostado únicamente por los eléctricos y acaba de firmar un acuerdo con sus dos mayores rivales en Japón, Toyota y Honda, para invertir 50 millones de euros en una red de estaciones de abastecimiento de hidrógeno por todo el país nipón.
Las tres marcas tienen sus propios proyectos de vehículo de pila de combustible (que emplean por tanto hidrógeno para moverse). Buen ejemplo de esto es el Toyota Mirai, disponible desde hace muy pocos meses.
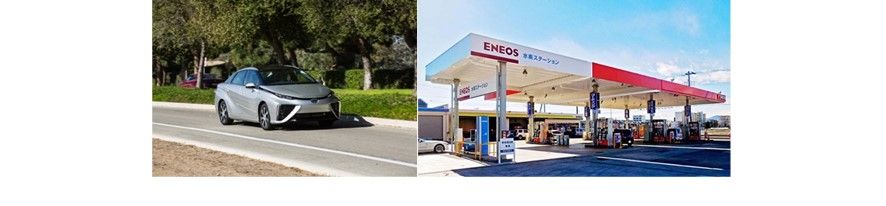
Figura 4 – De izquierda a derecha: Toyota Mirai, el coche de hidrógeno de Toyota; y una de las primeras estaciones de repostaje para vehículos de hidrógeno de Japón.
Cabe reseñar que todas las marcas están trabajando también en programas de reutilización de las baterías usadas de los vehículos eléctricos, una de las principales preocupaciones medioambientales de esta tecnología. Ya hay trabajos muy interesantes en este línea de la propia Nissan, con acuerdos de reutilización de baterías para unidades de respaldo en aplicaciones comerciales e industriales con 7 Eleven y UPS, entre otras compañías. General Motors tiene una línea de actuación similar con su Chevrolet Volt y Tesla ha creado una división especial para comercializar las mismas baterías de su Modelo S para aplicaciones de almacenamiento de energía en domicilios y entornos comerciales.
Como conclusión, y sin ánimo de ser exhaustivos, este epígrafe ha presentado algunas de las diversas líneas de investigación actuales en tecnología de vehículos híbridos, 100% eléctricos, baterías y motores, y las tendencias más relevantes y recientes que están siguiendo algunas de las principales marcas del sector, reflejadas en el Salón Internacional del Automóvil de Frankfurt 2015, uno de los mejores escaparates del futuro de la automoción.
Por último, es interesante comentar que hay otras tecnologías de hibridación menos conocidas por el público en general, pero con un potencial muy interesante, sobre todo para dar lugar a vehículos de bajo coste, como son la tecnología de los vehículos híbridos hidráulicos. Sirva como mero apunte comentar que la Agencia de Protección Medioambiental (EEUU) ha venido desarrollando interesantes proyectos, por ejemplo en el caso de vehículos de reparto de UPS, con tracción híbrida hidráulica y cuenta con sistemas de tracción basados en esta tecnología para diversas aplicaciones. Según los estudios y pruebas realizados esta alternativa tiene un importante atractivo por su gran capacidad de reducción de emisiones y podría constituir un candidato interesante para las marcas, principalmente en vehículos personales de gran tamaño, como SUVs, pick-ups o furgonetas.
b.- Nuevas tecnologías de mayor sostenibilidad en el uso de los automóviles: hacia la conducción 100% autónoma.
La conducción autónoma o automática, en sus diferentes grados de automatización (parcial, alta o total), contribuirá al incremento de la seguridad en el transporte por reducir la carga de trabajo del conductor en el interior del vehículo y por minimizar los errores humanos y los accidentes debidos a pérdidas de atención de cualquier tipo. Otra importante ventaja será la reducción de las aglomeraciones de tráfico, principalmente en áreas urbanas y en autopistas, gracias a que permite optimizar la conducción, minimizar los cambios de velocidad y las situaciones de constante arranque y parada. Esto reducirá las emisiones contaminantes de los vehículos y el consumo de combustible y tendrá un importante efecto beneficioso sobre el medioambiente.
La conducción alta o totalmente automática en autovía podría ser real en los próximos diez a quince años, una vez resueltos una serie de temas legales espinosos. Por otro lado, la conducción automática en ciudades requiere todavía de un importante desarrollo tecnológico para hacer que los vehículos sean completamente seguros en este tipo de entornos.
Para analizar con un mayor detalle las ventajas reales que podrá traer consigo la implantación de la conducción autónoma, empecemos por dar algunos datos relevantes.
En primer lugar, hay que tener en cuenta que el conductor de un vehículo tiene una influencia importante sobre el consumo de combustible. Con un estilo de conducción óptimo se puede reducir el consumo de un automóvil promedio en un 10-15%. Hoy en día la mayoría de coches de gama media y media-alta incorporan sistemas de indicación de conducción eficiente, que aconsejan la marcha o relación de cambio en la que se debe circular, dan una indicación (meramente cualitativa) del consumo instantáneo de combustible y muestran si el estilo de conducción es “ecológico” o “deportivo”. Se prevé que estos sistemas alcancen su plena madurez antes de 2017.
La clave, sin embargo, es la transición de este tipo de ayudas hacia tecnologías de conducción longitudinal de forma automática y energéticamente eficiente. Estos nuevos sistemas controlarían los cambios de velocidad del vehículo pero sin controlar los cambios de dirección (giros de volante en cruces, cambios de carril, adelantamientos, etc.). Este primer paso hacia la automatización completa de los vehículos permitiría eliminar al conductor de la ecuación durante buena parte del tiempo de conducción. El conductor siempre tendría la posibilidad de tomar el control, pero durante la conducción automática a este nivel se podrían alcanzar reducciones del consumo de hasta el 20% en el transporte por carretera, en condiciones ideales.
El impacto de la conducción autónoma a distintos niveles también reducirá las escalofriantes cifras de accidentes en carretera. Sólo en Europa, más de 30.000 personas murieron en accidente de tráfico en 2011. Por cada muerte en carretera hay un promedio de 4 lesionados permanentes, 8 lesionados graves y 50 heridos leves. Un dato a tener muy presente es el hecho de que el 95% de los accidentes son debidos a fallo humano.
Otro beneficio económico tangible y muy relevante de la futura conducción automática es la reducción de los grandes atascos que se producen en toda la UE. Estos problemas de circulación no son únicamente una molestia para los conductores, sino que provocan un elevado consumo de combustible y una pérdida de productividad en las empresas. Se calcula que los problemas derivados del tráfico generan una pérdida del 1% del PIB europeo.
Por último es importante reseñar que el desarrollo e integración de la conducción automática en la automoción del futuro debe tener muy en cuenta a otros usuarios de la vía no automatizados y, muy especialmente, a los denominados usuarios vulnerables (peatones, ciclistas, etc.). Si bien la conducción automática es posible hoy con tecnologías ya existentes, en ciertos entornos y sin necesidad de grandes desarrollos en comunicación V2x (Vehicle to x, es decir, comunicación entre el vehículo y otros elementos presentes en la conducción como peatones, infraestructura viaria u otros vehículos), se necesita aún un importante desarrollo para su implementación a gran escala en entornos reales, no controlados y con un gran mix de tráfico, principalmente ciudades. De acuerdo a diversos estudios llevados a cabo para la Comisión Europea, incluso una penetración limitada de la conducción automática tendría importantes beneficios para la sociedad.
A continuación, se van a analizar en detalle, área por área y de forma esquemática, los principales retos tecnológicos y de toda índole que hay que superar para ir avanzando en el camino hacia la conducción totalmente automática.
Percepción
Una de las áreas claves para conseguir una conducción automática eficiente y segura es la percepción precisa, integrada y en tiempo real de todo lo que rodea al vehículo.
Los aspectos que precisan investigación en esta área son los siguientes:
- Reconocimiento y seguimiento fiable de objetos, reconocimiento de la situación (incluyendo ruta a seguir e identificación de maniobras)
- Sistemas de posicionamiento de alta precisión, tanto en la dirección de la marcha como en dirección lateral
- Representación precisa de la carretera o vía por la que se circule, detección de espacios libres, clasificación de objetos presentes en la vía, arquitectura de Percepción Común o Integrada
Automatización del vehículo
La automatización afecta fundamentalmente al automóvil y en concreto a las siguientes áreas:
- Planificación de maniobras, trayectoria y ruta
- Algoritmos de planificación compatibles con el usuario. Deben permitir una interacción intuitiva con el conductor en las diversas fases de la conducción: circulación, guiado (para maniobras), estabilización; y lograr simplificar los cambios de modo de operación (por ejemplo cambiar de conducción con asistencia parcial a asistencia alta o total o volver a conducción manual)
- Algoritmos de planificación cooperativos para la interacción con otros usuarios de la vía, con la infraestructura y con sistemas inteligentes de gestión del tráfico
- Integración de las imprecisiones de mapas y sensores y de las características de los diferentes actuadores del vehículo
- Seguridad garantizada en las diversas maniobras. Esto incluye temas tan importantes como la capacidad del sistema de prever que el usuario pueda realizar maniobras de bajo riesgo ante una situación de peligro, si la toma de control por parte del sistema automático falla.
Factores humanos y Psicología
Esta área es fundamental ya que tanto los niveles de automatización parcial como alta precisan del conductor. En estos dos niveles el control de algunas o todas las operaciones lo lleva el vehículo pero el usuario debe estar siempre listo para tomar el control y no puede dormir o leer, por ejemplo (sólo el nivel de automatización total lo permite).
Los aspectos clave que se investigan en este apartado son:
- Control del comportamiento y rendimiento del conductor y control de los efectos de una conducción automática prolongada sobre el conductor
- Optimización de los modos de transición (modos en los que se cambia de nivel de conducción autónoma o entre conducción autónoma y manual)
- Supervisión de la habilidad del conductor en todo momento para tomar el control si fuera necesario
- Controlabilidad: supone determinar si las posibles alarmas, fallos o intervenciones requeridas del usuario son controlables de forma eficiente por el conductor
- Definición clara de reglas de arbitraje e interacción, que deben regular cuándo puede el usuario tomar el control, cuándo es el sistema el que controla la conducción, o si el control está deslocalizado del coche porque se está realizando una conducción en masa de un conjunto de vehículos
- Combinación de los datos suministrados por los sensores a bordo del vehículo con los datos que provienen de sistemas externos
- Diseño y desarrollo de la Interfaz Hombre-Máquina (HMI, Human Machine Interface, en inglés). Diseño de elementos visuales, acústicos, cinestésicos, etc. para la comunicación del estado del sistema, avisos, alarmas, peticiones e introducción de órdenes de usuario
Sistemas avanzados de gestión del tráfico
Una tecnología optimizada de conducción automática ofrece todavía un mayor potencial si se combina con un sistema eficiente de gestión del tráfico, especialmente en entornos urbanos.
En el campo de la gestión del tráfico las siguientes son las principales áreas de investigación:
- Interacción de los sistemas de navegación a bordo del vehículo con la información proveniente del centro de control de tráfico
- Plataforma abierta en los sistemas de control del vehículo que permitan la entrada de datos externos de información del tráfico en tiempo real, aviso de accidentes, condiciones de la carretera, condiciones climáticas, etc.
- Sistemas de arbitraje entre las decisiones del conductor, del vehículo y del centro de control de tráfico
- Sistema distribuido de gestión del tráfico: varias de las tareas que normalmente realizaría el centro de control de tráfico las puede gestionar un conjunto de vehículos altamente automatizados, con apoyo de sensores en la infraestructura, en puntos críticos (intersecciones, tramos peligrosos, etc.)
- Sistema de supervisión de la conducción autónoma. Se trata de controlar que la conducción automática de un elevado número de vehículos se haga en condiciones totalmente seguras y así se añade un segundo nivel de seguridad a los controles internos de fiabilidad de los que ya dispone cada vehículo internamente
- Nuevas aplicaciones logísticas: la implantación de un parque de automóviles con elevada automatización permitiría también la automatización de vehículos de transporte de mercancías y abriría nuevas posibilidades de negocio y un cambio de paradigma para la logística. Se podrían habilitar carriles, zonas o franjas horarias de uso exclusivo para transportes de este tipo, que llegarían mucho antes a su destino, sin perjudicar a los demás usuarios de la vía
- Nuevos sistemas de gestión del transporte intermodal automatizado.
Platooning o conducción en masa o formación
Especial atención por su interés (y por su carácter especialmente futurista) merece el platooning o la conducción autónoma en masa de un gran número de vehículos.
Para el desarrollo eficiente de este modo de conducción automática se deben desarrollar las tecnologías de comunicación V2V (Vehicle to Vehicle, vehículo a vehículo) que permitan a un conjunto de automóviles el desplazarse por una determinada vía, cada uno por su carril, y comunicándose entre ellos.
El desplazamiento se desarrolla manteniendo distancias o tiempos fijos (y muy reducidos) entre vehículos. Cualquier cambio de velocidad del coche líder se transmite al resto de vehículos, así como, por ejemplo, otros aspectos importante como la necesidad de un vehículo de abandonar la formación.
Se prevé que el desarrollo de la conducción en formación comience con flotas de camiones (debido al fuerte incentivo económico de las reducciones del consumo de combustible, previstas en un 10-15%). Los primeros proyectos demostradores se llevarían a cabo con únicamente dos camiones en formación y conductores en el interior de los mismos, para ir aumentando la complejidad y automatización del conjunto de vehículos. El gran reto, sin embargo, es el desarrollo del platooning urbano.
Modelado
Antes de poder implantar todas estas tecnologías en el mundo real es preciso modelar todos los elementos del sistema, incluido el conductor, y todos los escenarios que se pueden dar en la realidad. Esto incluye también el modelado preciso de todos los sensores y sistemas que llevarían los vehículos automáticos (radar, lidar, GPS, comunicaciones inalámbricas, etc.).
Es fundamental que se vayan empleando paulatinamente modelos tipo Hardware In the Loop (HIL), que incluyen el modelado matemático de los sistemas reales sobre los que actúa el sistema de conducción autónoma (dinámica vehicular, sistema de suspensión, frenos, tracción, motor, etc.).
Si estas herramientas se combinan con modelos de tráfico avanzados, se puede estimar el comportamiento de un sistema completamente automático en cualquier entorno, urbano o no, y sus implicaciones en reducción de emisiones, accidentes, etc.
Seguridad y modos de fallo seguro
En el marco de los requisitos de seguridad que actualmente están en vigor para el desarrollo de cualquier tecnología para el automóvil, los denominados niveles A-SIL (Automotive Safety Integrity Levels), se deben desarrollar también todas las tecnologías de conducción autónoma, para asegurar no sólo una operación segura, sino modos de fallo que minimicen el peligro para las personas. Esto cobra especial importancia en el caso de tecnologías x-by-wire, u operación por cable de distintos sistemas (como por ejemplo Steer-by-wire o sistema de dirección por cable, sin conexión mecánica).
Validación de tecnologías y aspectos legales
Por último, es necesario que todas las tecnologías desarrolladas en el marco de la conducción autónoma sea validadas por entidades independientes, de acuerdo a estándares internacionales. Por otro lado, y aunque no se trata de aspectos puramente tecnológicos, se deben resolver un gran número de aspectos legales. De lo contrario la conducción autónoma jamás será una realidad. Dentro de éstos cabe destacar la determinación de la responsabilidad en caso de accidente si el vehículo circulaba en modo alta o totalmente automático.
Como conclusión al apartado de la conducción autónoma, merece la pena reseñar que, de acuerdo a estudios llevados a cabo por la UE en 2013, el platooning o conducción en formación podría ser una realidad en autovías en 5 años, el platooning urbano podría implantarse en 5-8 años y la conducción totalmente automática en unos 10-15 años.
Para cuantificar los efectos beneficiosos que tendría la conducción automática, sirvan los siguientes datos. Los resultados del proyecto SARTRE en Europa muestran que el consumo de combustible en aplicaciones logísticas se reduce en más de un 8% para el camión líder y en un 14% para el resto de camiones de una conducción en masa para una formación que circule a 85km/h y con distancia entre camiones de 6m (esto se debe fundamentalmente a la reducción en la resistencia aerodinámica en este tipo de formaciones).
Adicionalmente, los modelos de tráfico aseguran que con la conducción en formación de cualquier tipo de vehículos se podría duplicar la capacidad de una autovía.
En resumen, con un sistema de conducción automático (sin ser todavía totalmente autónomo) y un sistema de gestión de tráfico inteligente se reducirían los atascos en un 50%, los accidentes en un 8% y las emisiones y el consumo (en ciudades) en un 10%-20%.
Conclusión.
Como conclusión, simplemente cabe comentar lo prometedor del futuro de la automoción, para el colectivo del ICAI y para todos los ingenieros, con grandes retos por superar y un apasionante camino hacia la sostenibilidad real en uno de los sectores más importantes para la sociedad. Terminemos recordando las citas de dos personajes que marcan los albores de la automoción a escala industrial y el futuro de la automoción en el siglo XXI.
“No inventé nada nuevo. Simplemente junté los descubrimientos de otros hombres que trabajaron durante siglos. El progreso ocurre cuando todos los factores que lo constituyen están listos… y entonces es inevitable.” Henry Ford (1863-1947).
“La conducción autónoma es como los ascensores. Antes teníamos un operador. En el futuro sólo pulsaremos un botón para ir donde queramos.”
Elon Musk (CEO de Tesla. Co-fundador de PayPal y SpaceX, 1971-actualidad).
REFERENCIAS BIBLIOGRÁFICAS
- http://www.eea.europa.eu/soer-2015/europe/transport(European Environment Agency)
- http://www.epa.gov/region9/air/hydraulic-hybrid/
- Electric vehicle traction motors without rare earth magnets, James D. Widmer, Richard Martin, Mohammed Kimiabeigi, Centre for Advanced Electrical Drives, School of Electrical and Electronic Engineering, Newcastle University, Newcastle-upon-Tyne, UK (2015)
- http://www.thedetroitbureau.com/2015/09/debuts-to-watch-at-frankfurt-motor-show/
- Roadmap: Automation in road transport. iMobility Forum (May 2013)
- European Roadmap Smart Systems for Automated Driving. European technology Platform on Smart Systems Integrations
- TNO report 2008-D_R0996/A: “Smarter and better – the benefits of intelligent traffic”
- European Green Cars Initiative PPP: Multi-annual roadmap and long-term strategy; Long Distance Transport, November 2010
- ERTICO thematic paper: “Highly Automated Driving (HAD) – Future Foresight from an R&D Perspective”
- FORESIGHT, OFFICE OF SCIENCE AND TECHNOLOGY, Intelligent Infrastructure, Futures Scenarios Toward 2055 – Perspective and Process
- Gasser, T, D. Westhoff, (2012) BASt-study: Definitions of Automation and Legal Issues in Germany
- Frost and Sullivan (2011); Smart Cities: Impact on and Opportunities for Energy Infrastructure
- Shladover, S.E. (2012) University of California PATH Program, Automated Vehicles: Terminology and Taxonomy
- Swedish Maritime Administration Kenneth Wåhlberg, VINNOVA, Trafikverket: The Swedish Green Corridor Initiative, 2012-03-07
- United Nations Department of Economic and Social Affairs Population Division (2012) – World Urbanization Prospects, The 2011 Revision. Available at http://esa.un.org/unpd/wup/pdf/WUP2011_Highlights.pdf
- Arem, B, B. Jansen, M. van Noort (2008), TNO report 2008-D_R0996/A: “Smarter and better – the benefits of intelligent traffic”